DGIST, 세포 약물 봉인해 전달하는 캡슐형 마이크로 로봇 개발
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
세포 및 약물 전달의 외부 영향 최소화해 망막변성 등 치료에 활용 기대
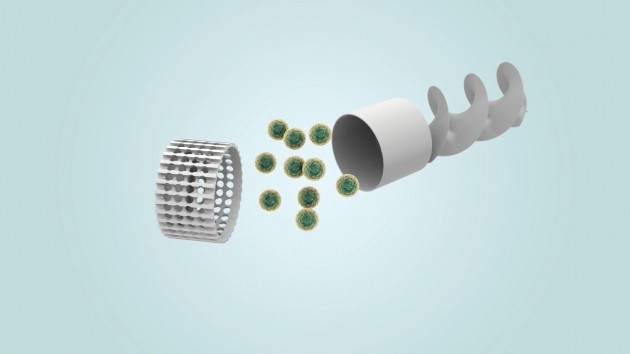
마이크로로봇 외부에 세포 나 약물을 탑재하는 기존 방식과 달리 뚜껑을 열고 닫을 수 있는 형태의 마이크로로봇이라는 점이 특징이다.
DGIST(총장 손상혁)는 로봇공학전공 최홍수 교수(DGIST-ETH 마이크로로봇연구센터 공동센터장)팀이 뇌·인지과학전공 문제일 교수팀, 스위스 취리히연방공대(ETH) 브래들리 넬슨(Bradley J. Nelson) 교수팀과 공동연구를 통해 세포 및 약물을 봉인할 수 있는 캡(cap) 구조물과 박테리아의 움직임을 모사한 추진체를 활용한 캡슐형 마이크로로봇을 개발했다고 23일 밝혔다.
전 세계적으로 의료시장 및 의료기기에 대한 새로운 기술개발이 가속화되며 몸속 원하는 부위에 치료약물이나 세포를 전달할 수 있는 마이크로로봇과 같은 첨단의료로봇 분야에 대한 연구가 활발히 진행되고 있다.
지금까지 대부분의 세포 및 약물 전달용 마이크로로봇은 로봇 외부 표면에 다양한 방법으로 탑재하거나, 생분해성 재료와 세포 혹은 약물을 혼합해 마이크로로봇으로 제작한 뒤 생분해성 재료가 분해되면서 세포나 약물을 방출하는 방법, 세포 및 약물 전달용 자성입자 개발 등의 형태로 개발되고 있다. 이런 형태들은 마이크로로봇을 인체 내에서 조작할 때 세포와 약물이 외부 환경에 의해 손실될 수 있다는 점이 한계로 지적돼왔다.
이를 극복하기 위해 최홍수 교수팀은 마이크로로봇 머리 부분에 세포나 약물 등을 봉인해 뚜껑을 열고 닫을 수 있는 캡(caps) 형태의 구조물과 박테리아의 꼬리 움직임을 모사한 추진체를 융합한 캡슐형 마이크로로봇을 개발했다.
연구팀은 미세전자기계시스템(MEMS, Micro Electro Mechanical Systems)기술 가운데 3차원 레이저 리소그래피 시스템을 이용해 3차원 폴리머 구조물을 제작했다. 여기에 외부 자기장으로 마이크로로봇을 구동할 수 있도록 자성 물질인 니켈(Ni)과 생체적합 물질인 티타늄(Ti)을 캡슐형 마이크로로봇 표면에 증착시켜 캡슐형 마이크로로봇으로 제작했다.
자기장을 이용한 캡슐형 마이크로로봇 실험에서 수에서 수십 마이크로미터(㎛, 100만 분의 1m) 크기의 입자를 ‘포집과 방출 기능(Pick and drop motion)’으로 이송했으며 실제 후각신경세포를 봉인해 세포가 살아서 정확한 위치에 전달하는 생체적합성 실험도 성공했다.
연구팀이 개발한 캡슐형 마이크로로봇은 유체의 소용돌이(vortex) 현상을 이용해 세포나 약물을 담아 원하는 부위에서 방출할 수 있어 외부 환경에 따른 세포나 약물의 손실을 최소화하고 정확한 양의 세포나 약물을 전달할 수 있다. 눈이나 뇌와 같은 인체 내 흐름이 적은 유체에서 조작해 망막변성과 같은 질병을 치료하는데 활용할 것으로 기대된다.
최홍수 DGIST 로봇공학전공교수는 “캡슐형 마이크로로봇을 이용하면 세포와 약물을 봉인한 뒤 원하는 부위에서 방출할 수 있어 외부 환경에 따른 세포와 약물이 손실과 변성을 막을 수 있다”며 “앞으로 의공학적으로 다양하게 응용할 수 있도록 후속연구를 진행하겠다”고 말했다.
이번 연구 결과는 바이오소재 분야 국제학술지 ‘어드밴스드 헬스케어 머티리얼즈(Advanced Healthcare Materials)’ 5월 9일자 표지논문으로 게재됐으며 과학기술정보통신부와 산업통상자원부 지원으로 수행됐다. 오경묵 기자 okmook@hankyung.com

-
1
선급금만 8200억원…MSD, PD-1xVEGF 이중항체 도입한 배경은
미국 머크(MSD)가 마일스톤 총 4조6000억원을 투입해 PD-1xVEGF 이중항체 파이프라인을 확보했다. 업계에서는 MSD가 이번 대형 딜을 하게 된 배경으로 사실상 PD-1xVEGF 이중항체가 ‘넥스...

-
2
고객관계관리(CRM) 소프트웨어 글로벌 1위 기업인 세일즈포스의 시스템이 장애로 중단됐다. 세일즈포스의 업무 도구를 활용하고 있는 기업의 세일즈, 서비스 플랫폼 등이 일제히 ‘먹통’이 됐다.&n...
-
3
고객관계관리(CRM) 소프트웨어 글로벌 1위 기업인 세일즈포스의 시스템이 장애로 중단됐다. 세일즈포스의 업무 도구를 활용하고 있는 기업의 세일즈, 서비스 플랫폼 등이 일제히 ‘먹통’이 됐다.&n...
