전개도 접어 로봇 만든다
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
임세혁 한국과학기술연구원(KIST) 지능로봇연구단 선임연구원과 김상배 미국 매사추세츠공대(MIT) 교수 등 국제 연구진은 로봇의 입체 형태를 펼쳐서 한 평면에 나타낸 전개도를 접는 방식으로 실제 동작하는 로봇을 만드는 방법을 개발했다고 20일 발표했다.
최근 종이나 필름을 자르고 접는 방식으로 로봇을 만드는 로봇 기술이 세계적으로 주목받고 있다. 이런 로봇은 제작시간이 짧고 제작비용이 적게 들어 대량생산이 쉽다는 평가를 받는다. 전기나 열, 자기장, 습도 변화에 따라 스스로 몸을 접거나 펴는 4D프린팅 기술과 접목하면서 더욱 발전하고 있다.
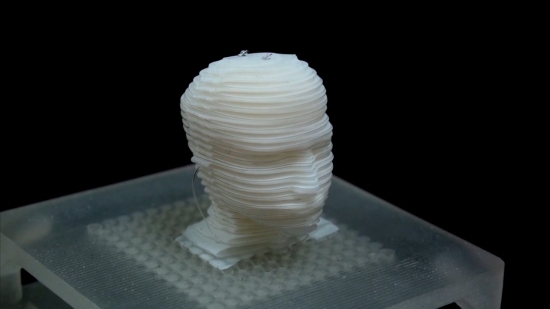
연구진이 이번에 개발한 로봇은 ‘적층형 자가접기’가 사용됐다. 전개도를 구성하는 여러 장의 단면 가운데 양끝을 실로 연결해 잡아당기면 단면들이 스스로 접히면서 입체 형태를 만드는 것과 같은 원리다. 로봇의 단면이 한장한장 쌓이면서 입체 형태의 로봇 모습을 갖춘다.
연구진은 폴리에스터 재질의 전개도를 이용해 사람 얼굴, 토끼, 시드니 오페라하우스 모습을 딴 입체 로봇을 만들었다. 사람 얼굴 형태의 로봇을 구성하려면 단면이 50장 정도, 토끼는 30장 정도 필요하다.
이 기술은 무엇보다 로봇의 형태와 동작방법을 전개도 한 장에 담는 것이 핵심이다. 연구진은 영화 대사나 음악에 따라 로봇의 특정 부위에 힘을 가해 유연하고 생동감 있게 움직이도록 하는데도 성공했다.
이전에도 3D프린터로 로봇을 구동장치까지 한꺼번에 제작하는 연구가 추진됐다. 하지만 장비가 비싸고 로봇의 움직임과 속도에 제한이 있다는 지적이 과학자들 사이에서 제기됐다. 이번에 개발된 로봇은 부드러운 몸체와 외부충격에 유연한 특성을 갖는다.
임 선임연구원은 “로봇의 디자인과 기능에 따른 최적의 설계가 가능하다”며 “대화형 인공지능기술을 융합하면 개인·서비스 로봇 관련 산업에도 광범위한 변화를 일으킬 수 있을 것으로 기대한다”고 말했다. 이번 연구는 로봇 분야 국제학술지인 ‘국제로봇연구 저널’ 최신호에 소개됐다.
박근태 기자 kunta@hankyung.com

-
1
"퀄리티 정말 미쳤다"…유튜브 뜬 日미소녀에 '초긴장' [영상]
오픈AI가 21일 공식 유튜브와 인스타그램에 수많은 일본 여성이 등장하는 30초 분량 영상을 공개했다. 오픈AI는 자체 영상 생성 인공지능(AI) '소라(Sora)'를 이용해 제작된 영상을 꾸준히 선보...
!["퀄리티 정말 미쳤다"…유튜브 뜬 日미소녀에 '초긴장' [영상]](https://img.hankyung.com/photo/202411/01.38715246.3.gif)
-
2
SK브로드밴드가 B tv에서 인공지능(AI)을 활용한 키즈 콘텐츠를 선보인다고 21일 발표했다. 이번에 추가하는 ‘AI로 만든 읽어주는 동화’는 텍스트 기반 동화 단행본을 AI가 주문형비디오(V...
![[포토] SKB "동화책, 애니메이션으로 즐겨요"](https://img.hankyung.com/photo/202411/AA.38714473.3.jpg)
-
3
LG유플러스가 삼성전자와 ‘인공지능(AI)폰’ 협업에 나섰다. AI 비서 서비스가 원활히 구현되는 스마트폰을 선보이는 것이 두 회사의 공통된 목표다. 이들의 합작품은 내년 중 나올 전망이다.&n...
