자율주행 차량이 다른 차량과 협력적 주행을 하면 차량 흐름을 이기적 모드로 운전할 때보다 35%가량 개선할 수 있다는 실험결과가 나왔다.
영국 케임브리지대학에 따르면 이 대학 컴퓨터과학기술학과 어맨다 프로록 박사가 이끄는 연구팀은 자율주행 기능을 갖춘 미니어처 차량을 제작해 진행한 주행 실험에서 이런 결과를 얻었으며, 20일(현지시간) 캐나다 몬트리올에서 개막하는 '국제 로봇 및 자동화 콘퍼런스(ICRA)'에서 이를 발표한다.
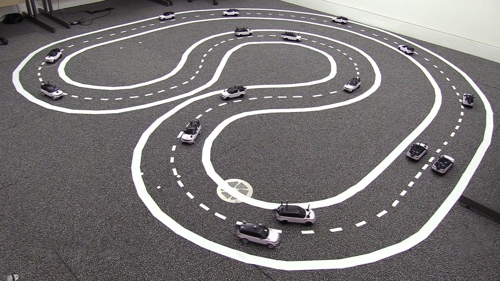
연구팀은 실내에서 2차선 트랙을 만들어 다양한 시나리오로 주행 실험을 했다.
실제 도로에선 1차선 도로에서 차량이 고장 등으로 멈춰 서면 그 뒤를 따르던 차량도 잇따라 서고 이들의 무리한 차선 바꾸기로 멀쩡하던 2차선 도로까지 정체가 빚어지기 마련이다.
그러나 자율주행 차량 실험에서는 차량 간 무선통신으로 1차선 도로에서 차량이 멈춰섰다는 상황이 주변 차량에 전파되고, 2차선 도로를 주행하던 차량이 속도를 늦춰 1차선 도로에 있던 차량이 차선을 바꿀 수 있게 협력주행을 함으로써 차량 정체를 최소화하며 매끄러운 차량흐름을 이어가는 것으로 나타났다.
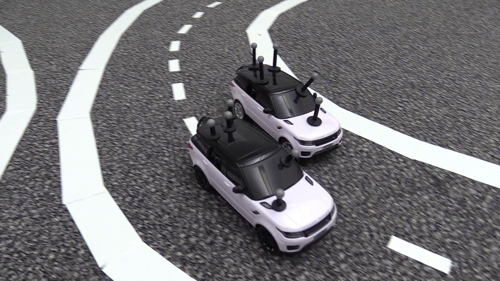
자율주행 차량 사이에서 인간이 작동하는 차량이 공격적으로 주행해도 자율주행 차량이 양보함으로써 안전도를 높이는 것으로 결과가 나왔다.
이번 연구는 케임브리지대학의 세인트 존스 칼리지 학부생 마이클 허와 다우닝 칼리지의 니컬러스 힐다마르가 지난해 여름 프로록 박사 연구실에서 학부생 연구프로젝트의 일환으로 진행됐다.
연구팀은 자율주행 차량이 도심 교통과 관련된 다양한 문제를 해결할 수 있는 능력이 있지만 이를 위해선 서로 협력할 수 있는 방법이 필요하다면서 이번 연구가 자율주행 차량 간 또는 인간이 운전하는 차량과 어떻게 교신할 것인가를 연구하는 데 유용하게 활용될 것이라고 밝혔다.
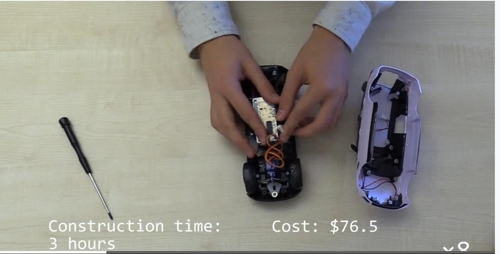
많은 차량이 동원된 자율주행 차량 주행 실험은 컴퓨터에서만 이뤄지거나, 실험 차량 자체가 너무 크거나 비싸 실내에서는 진행할 수 없었다.
연구팀은 이를 극복하기 위해 시중에 나와 있는 미니어처 차량에 신용카드 크기의 싱글 보드 컴퓨터인 '라즈베리 파이'와 동작 포착 감지기를 장착해 이용했다.
또 자율주행 차량은 안전할 때와 더 빨리 주행할 수 있을 때만 차선 변환을 할 수 있게 알고리즘은 개발해 적용했다.
실험은 한 차선에서 차량이 멈춰 섰을 때 자율주행 차량의 주행 방식을 협력 모드와 이기적 모드로 나눠 진행됐다.
그 결과 일반적인 운전 방식일 때는 협력 모드 주행이 이기적 모드 주행 때보다 35%가량 빨랐으며, 공격적인 운전을 할 때는 개선도가 45%에 달하는 것으로 나타났다.
프로록 박사는 성명을 통해 "이번 연구를 통해 자율주행 차량에 대한 실질적이고 비용이 적게 드는 다양한 실험을 할 수 있게 됐다"면서 "실제 도로에서 자율주행 차량의 안전을 확보하려면 차량이 어떻게 상호작용할지를 알아야 한다"고 강조했다.
연구팀은 앞으로 차선을 늘리고 교차로와 다양한 차종이 있는 복잡한 시나리오를 상정해 실험을 이어갈 계획이다.