"오프라인 어디서든 네이버와 '연결' 미래도시 구축"…무기는 AI·로봇
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
석상옥 대표 "사용자-네이버-로봇머신 이어지는 'A-시티' 만든다"
연내 서울시내 도로 2000km 매핑, 4족로봇 활용해 인도 매핑까지 추진"
'로봇 박사' 석상옥 네이버랩스 대표(사진)는 25일 취임 후 첫 간담회를 열고 네이버랩스 성장 로드맵을 공개하면서 이같이 강조했다. 자동화된 미래도시 '에이시티(A-CITY)'를 목표로 지능형 자율주행머신을 구축, 모든 공간을 네이버와 연결하겠다는 포부를 밝혔다.
석 대표는 이날 서울 용산 드래곤시티 호텔에서 열린 간담회에서 "네이버랩스가 도전할 기술 목표인 에이시티는 다양한 형태의 기계들이 도심 각 공간을 스스로 이동하며 새로운 방식의 '연결'을 만드는 것"이라며 "인공지능(AI)과 로봇이 공간 데이터를 수집·분석·예측해 최종적으로 다양한 인프라들이 자동화되는 도심 환경을 구축하겠다"고 말했다.
이어 "도심 속 실내와 도로, 인도 등 모든 공간을 고정밀 지도 데이터로 통합하고 장소·환경·목적에 따라 변용이 가능한 지능형 자율주행머신을 구축할 계획"이라며 "여기에 자연스러운 인터랙션 기술을 더해 네이버와 연계된 정보·서비스를 사용자들에게 제공할 것"이라고 했다.
한 마디로 AI, 로봇 등 네이버랩스가 개발하는 신기술을 적극 활용해 온라인뿐 아니라 오프라인 공간에서도 어디서든 네이버와 '연결'되는 미래도시를 만들겠다는 구상.
올 초 세계 최대 국제가전전시회 'CES 2019'에서 공개한 기술들은 한층 진화했다. CES에서 네이버랩스가 선보인 5G 브레인리스 로봇 '앰비덱스(AMBIEDX)', 자율주행 로봇 '어라운드'는 석 대표가 개발을 주도한 제품들이다.

석 대표는 "새로운 목표 아래 그간 로보틱스, 자율주행, 매핑(mapping), 측위(localization) 등 기술들이 진일보했다. 글로벌 리더십을 확보한 이 기술들은 네이버의 미래를 그려나가는 초석이 될 것"이라고 자신했다.
퀄컴과 협업한 5G브레인리스 로봇 제어기술과 자율주행 로봇 어라운드를 통합하는 것은 올해의 중요 미션 중 하나다. 네이버랩스는 연내 네이버 데이터센터 '각'이 자율주행 로봇들의 두뇌가 돼 성능과 활용성을 극대화하는 것을 목표로 NBP·퀄컴·인텔·KT와 다각도로 협력하고 있다.
석 대표에 이어 발표자로 나선 백종윤 자율주행그룹 리더는 도로 위에 적용될 첨단기술들을 소개했다.
백 리더는 위성위치확인시스템(GPS) 신호 음영 지역이 많은 도심 속 자율주행을 위해서는 자율주행머신의 두뇌이자 센서인 'HD맵'의 신속한 제작과 업데이트가 중요하다고 짚었다.
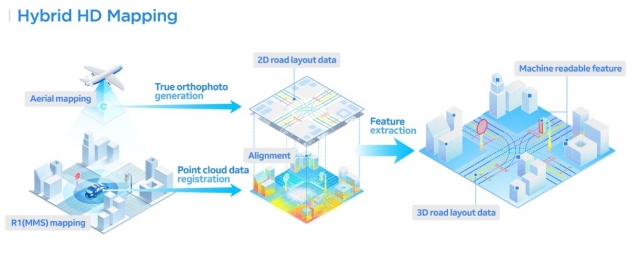
고도화된 '하이브리드 HD 매핑' 솔루션을 활용해 연내 서울 시내 왕복 4차선 이상의 주요 도로 2000km의 레이아웃 지도를 완성할 계획. 이렇게 구축된 HD맵과 GPS, 휠 인코더(Wheel Encoder), 라이다(LiDAR), 카메라 등 센서를 결합해 10cm 이내 정밀도로 끊김 없이 위치를 측정할 수 있는 측위 기술도 고도화 중이다.
백 리더는 "현재 네이버랩스는 미국자동차공학회 기준 총 5단계 가운데 4단계(고도자율) 수준의 자율주행기술 구현을 위해 초정밀 지도 제작 솔루션, 정밀 측위, 센서 융합을 통한 주변 환경인지 및 예측, 경로 계획 및 제어 등 자율주행에 필요한 모든 기술을 자체 확보하고 있다"며 "곧 국토교통부 임시운행 허가 차량을 추가해 실제 도로 위 다양한 상황에서의 기술 검증을 강화해나갈 것"이라고 설명했다.
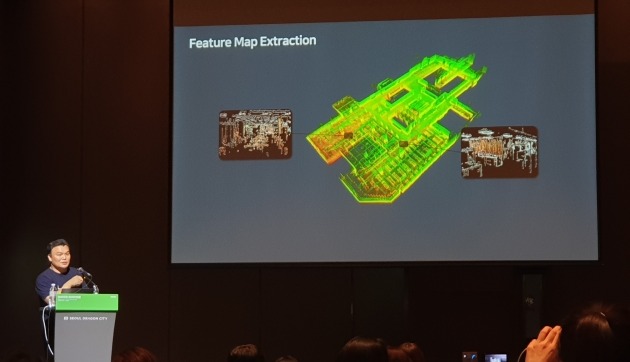
네이버랩스는 이날 3차원 실내 지도 제작 로봇인 M1의 상위 버전인 M1X를 활용한 대규모 실내 3차원 지도를 공개했다. 기존보다 제작 단가를 낮추면서도 위치 정확도가 30% 상승했다는 게 석 대표의 설명이다.

이러한 기술들이 대형쇼핑몰, 공항 등의 대규모 공간에서 보다 유용하게 활용될 수 있을 것으로 기대했다. 올해부터는 실내보다 환경적 변수가 다양한 인도 영역까지 이러한 매핑·로컬라이제이션 기술을 적용해나갈 계획이다.
석 대표는 "단기적으로는 사람이, 장기적으로는 4족 보행 로봇이 직접 매핑 및 로컬라이제이션을 위한 데이터를 취득할 수 있게 하는 프로젝트를 가동 중"이라고 말했다. 이를 위해 네이버랩스의 펀딩으로 미국 매사추세츠공대(MIT)에서 개발한 4족 보행 로봇인 치타3와 미니치타가 활용될 전망이다. 치타 로봇은 석 대표가 MIT 박사과정 재학 시절 개발한 로봇이다.
그는 "우리가 사는 생활 공간들은 여전히 새로운 기회로 가득하지만 앞으로 기술을 가진 회사만이 그 기회를 잡을 것"이라며 "기술로 네이버의 서비스 공간을 재창조하고 공간-상황-사용자-서비스를 연결, 궁극적으로 모든 공간을 네이버와 연결해 무한한 가능성을 창출하겠다"고 역설했다.
김은지 한경닷컴 기자 eunin11@hankyung.com
기사제보 및 보도자료 open@hankyung.com
-
1
[노정동의 3분IT] "어디 파이선 할 줄 아는 사람 없나요?"
[노정동의 3분IT]는 전자·IT 업계 최신 이슈를 3분 만에 둘러보는 코너입니다. 지난 3월 국내 배달앱(응용프로그램) 업체 '요기요'의 간담회 행사에서 강신봉 대표는 대뜸 "올해 200...
![[노정동의 3분IT] "어디 파이선 할 줄 아는 사람 없나요?"](https://img.hankyung.com/photo/201906/01.19953169.3.jpg)
-
2
네이버 "서울 주요 도로 정밀지도 연내 완성"…자율주행 박차
네이버랩스 기자간담회…"사용자-로봇 잇는 'A-CITY' 구축 네이버 서비스와 연계" 네이버가 올해 안에 서울 주요 도로의 고정밀지도를 완성하는 등 자율주행 상용화를 위한 기술 개발에 박차...
-
3
불황의 그림자가 한국 대표 기업으로 확산되고 있다. 2분기 실적 발표를 앞두고 네이버, 이마트 등 간판 기업들까지 첫 적자 가능성이 제기되며 불안감이 커지고 있다. 유가증권시장 상장사 전체의 영업이익도 전년 동기 대...


![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


