KAIST 로봇개, 美 MIT 카네기멜론대 제치고 세계 1위 올랐다
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
KAIST는 전기및전자공학부 명현 교수가 이끄는 미래도시 로봇 연구실이 지난달 29일~이달 2일 영국 런던에서 열린 '2023 국제 로봇 및 자동화 학술대회' 의 4족로봇 자율보행 경진대회에서 우승했다고 6일 밝혔다.
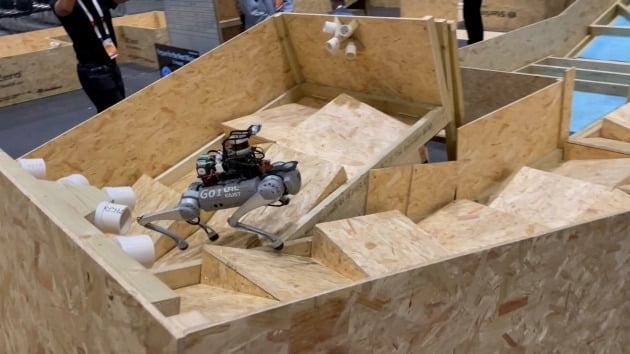
명 교수팀이 내놓은 4족보행 로봇은 계단을 성큼성큼 오르내리는 인공지능(AI) 자율보행 로봇 '드림워크'다. 4족보행 로봇은 재난현장 구조, 우주 탐사 등 다양한 분야에서 쓸 수 있어 산업적 수요가 높아지고 있다. 제조업 생산 능력을 높일 때도 필요하다. 삼성전자가 신성장 동력으로 로봇 분야를 지목하면서 레인보우로보틱스에 지분 투자를 하고, 현대자동차가 공중제비를 도는 인간형 로봇 '아틀라스'로 유명한 보스턴다이내믹스를 인수한 이유다.

본선은 붕괴 후 먼지가 덮힌 콘크리트를 모사한 지형, 모래·진흙·물웅덩이를 모사한 지형, 계단과 구멍 모사 지형 등 다섯 가지 구간에서 얼마나 잘 움직이는지 점수를 합산하는 방식으로 했다.
결승전에서 다른 팀들이 이들 구간을 완주하는 데 평균 49분이 걸린 반면 KAIST 드림워크는 41분 52초만에 완주했다.

이 때 필요한 기술이 3차원 라이다 센서, 관성 센서 등으로 로봇 위치와 주변 환경을 실시간 인식하는 인공지능(AI) 자율보행 기술이다. KAIST 미래도시 로봇 연구실은 넘어질 때 자동으로 다시 일어나 임무를 수행할 수 있게 하는 AI 강화학습 기반의 '재회복' 기술도 자체 개발해 탑재했다. KAIST 드림워크는 이런 기술을 토대로 이번 대회에서 다양한 장애물을 모두 극복하는 보행 능력을 선보였다.
명현 교수는 "로봇이 주변 환경을 인지하고 적절한 경로를 찾을 수 있도록 하는 기술은 모두 우리 연구팀이 독자 개발했다"며 "이들 기술이 국내 로봇 산업 경쟁력 제고에 기여할 것으로 기대한다"고 말했다.
이해성 기자 ihs@hankyung.com
-
1
이건희가 만든 '품질의 삼성'…JY '초일류 삼성'으로 계승한다
1993년 6월 7일 나온 이건희 당시 삼성 회장(선대회장)의 ‘신경영’ 선언에는 회장 취임 이후 5년 반 동안의 위기감이 담겨 있었다. 삼성 임직원이 ‘국내 1위’라고 자...

-
2
이건희 新경영 선언 30년…이재용 '뉴 비전' 내놓는다
1993년 6월 7일, 이건희 당시 삼성 회장(선대회장)이 본사 주요 임원과 각국 법인장 200여 명을 독일 프랑크푸르트 인근 켐핀스키호텔로 불러 모았다. 이 자리에서 이 선대회장은 “국제화 시대에 변하지...
-
3
이건희 삼성그룹 선대회장의 유족은 그의 뜻에 따라 사회 환원에 힘쓰고 있다. 이 선대회장이 남긴 미술품 등 일명 ‘KH(이건희) 유산’이다.삼성 총수일가는 이 선대회장 유산의 약 60%를 사회에...

![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


