한국 기술에 세계가 놀랐다…"YOU WIN" 엄지척, MIT도 감탄 [강경주의 IT카페]
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트
명현 KAIST 전기 및 전자공학부 교수 인터뷰
로봇 대회서 KAIST 246점 vs MIT 60점 '압승'
승리 비결은 로봇 자율 보행 기술 '드림워크'
"'올해의 KAIST인'상 수상은 최고의 명예"
"성과 낸 과학자·연구팀엔 확실한 보상 해줘야"

자율 보행 기술의 핵심 '드림워크'
명 교수는 13일 한국경제신문과의 인터뷰에서 "압도적인 우승 비결은 자율 보행 로봇 제어기 '드림워크(DreamWaQ)'가 있었기 때문"이라고 말문을 열었다. 드림워크는 로봇이 라이다(레이저로 주변을 측정하는 장치)나 비전(3차원 인식 장치) 등 시각·촉각 센서 도움 없이 블라인드로 보행이 가능하도록 돕는 소프트웨어(SW) 기술이다. 명 교수팀이 독자 개발한 드림워크는 로봇 몸체 센서와 관절 센서 정보만으로 계단을 오르고 험지를 보행하는 것이 특징이다.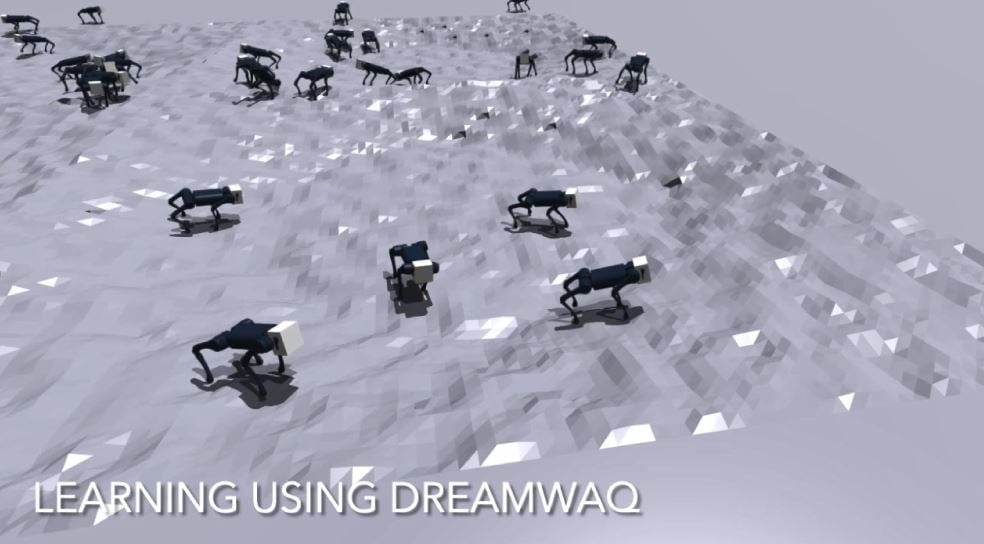
개발 과정에선 참고할만한 선진 연구가 없어 애를 먹었다. 명 교수는 "자율 보행을 완벽하게 구현하는 로봇 기술이 없다보니, 8명의 연구실 학생들이 모든 알고리즘을 일일이 짤 수밖에 없어 밥먹듯 밤을 샜다"고 전했다.
QRC에서 KAIST가 거둔 성과는 '우승'이라는 타이틀보다 '자율 보행'을 증명했다는데 있다. 사람이 수동 조작으로 로봇을 조종할 수 있지만 로봇이 조종자의 시선을 벗어나면 와이파이 등 별도의 무선 통신을 통해 센서 정보를 수신해 조종하는 수밖에 없다. 통신 지연이나 두절로 센서 정보 취득이 원활하지 못한 상황이 발생하면 로봇의 기능을 잃게 된다.

명 교수는 드림워크를 고도화해 돌발 상황이 많은 현장에 투입 가능한 로봇을 개발하겠다는 목표를 갖고 있다. 그는 "재난 상황, 건설 현장, 원자력발전소, 산악 지형의 검문소 등 다양한 비정형 지역에 드림워크를 적용한 사족 보행 로봇을 투입하면 사회적 비용을 줄이고 로봇의 공적 역할을 증대할 수 있다"며 "무인화가 필요한 다양한 상황에서 쓰임새가 무궁무진하다"고 설명했다.
일상 생활에서도 활용 가치가 크다는 설명도 보탰다. 명 교수는 "노약자 산책, 간호 보조, 택배 운반, 간단한 심부름 정도는 머지 않은 미래에 충분히 가능하다"며 "넓게 보면 우주 무인 탐사에도 효과적으로 쓰일 수 있다"고 덧붙였다.

뼛속까지 'KAIST인'
명 교수는 학부, 석사, 박사 학위를 모두 KAIST에서 땄다. 뼛속까지 'KAIST인'인 그에게 '올해의 KAIST인' 수상 소감을 묻자 "학생들이 잘해준 덕분"이라며 공을 돌렸다. 하지만 학내에선 받을만한 사람이 받았다는 평가가 나온다.명 교수 연구팀은 지난해 QRC 우승 외에도 로봇 분야 최대 학술대회인 'IEEE ICRA'가 주최한 '힐티슬램챌린지(HILTI SLAM Challenge)'에서 각각 라이다 분야 전체 1위와 비전(vision) 분야 학계 1위의 성과를 거뒀다. 뿐만 아니라 IEEE 국제 로봇·자동화 저널 '최우수 논문상'을 수상하는 등 겹경사를 맞았다.

지난 20년 간 자율보행, 자율주행, 자율비행에 포커스를 맞춰 연구한 명 교수는 앞으로 누구나 쉽게 로봇을 접하고 사용할 수 있는 '로봇 종합 플랫폼'을 구축하겠다는 포부를 밝혔다. 로봇개 형태의 4족 보행을 넘어 휴머노이드 같은 2족 보행에도 적용 가능한 SW 개발에도 힘을 쏟을 예정이다.
그는 "자율 보행 분야에서 최소 2~3년의 기술 격차를 유지하도록 원천 기술을 확보하고 이를 상업화해 한국의 과학 기술 발전에 힘을 보태겠다"며 "개인의 부귀 영화보다 국가를 위해 자신의 진로를 택하는 용감한 과학자들이 많이 생겨나길 희망한다"고 했다.

-
1
MIT 꺾은 KAIST 보행 로봇…"밤새 AI 알고리즘 짠 결과"
지난해 6월 영국 런던에서 열린 사족 로봇 자율보행 경진대회(QRC·Quadruped Robot Challenge). 한국 대표로 나선 KAIST 사족 보행 로봇이 비탈지고 울퉁불퉁한 다각형 박스 장애물...

-
2
"일본 앞질렀다"…전세계 장악할 한국 기술 뭐길래 [강경주의 IT카페]
국내 로봇 연구개발(R&D) 권위자인 김정 KAIST 기계공학과 교수는 세계에서도 보기 드문 '햅틱'(Haptic·로봇 촉각) 연구자다. 수많은 로봇 R&D 분야 중 그가 햅틱에 주목한 이...
!["일본 앞질렀다"…전세계 장악할 한국 기술 뭐길래 [강경주의 IT카페]](https://img.hankyung.com/photo/202403/01.36132005.3.jpg)
-
3
일본 열도 '충격'…첫 민간 로켓 5초 만에 '공중 폭발' [강경주의 IT카페]
일본 민간 우주기업 '스페이스원(SPACEONE)'의 소형 고체연료 로켓 '카이로스'가 13일 발사 직후 공중에서 폭발했다. 일본 민간 기업이 주도해 개발한 첫 로켓의 폭발에 일본 곳곳에...
![일본 열도 '충격'…첫 민간 로켓 5초 만에 '공중 폭발' [강경주의 IT카페]](https://img.hankyung.com/photo/202403/01.36115042.3.jpg)

![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


