고려대 세종캠퍼스 천성우 교수 연구팀, 사이언스 어드밴시스 표지 논문 게재
-
기사 스크랩
-
공유
-
댓글
-
클린뷰
-
프린트

이 생체모방 점착 제어 소형 로봇은 생물학적 조직과 유기체를 표적으로 하는 진단 및 치료에 잠재적으로 활용될 것으로 기대된다고 학교 측은 설명했다.
생체 환경에서 대상 표면에 점착과 탈착을 정밀하게 제어하는 기술은 수술용 도구와 로봇, 암 치료 등에서 핵심 기술로 알려져 있다.
그러나 섬세한 점착성과 탈착성을 동시에 구현하는 것은 매우 어려운 과제다.
특히 표면 손상 없이 낮은 압력으로 주름진 부드러운 생물학적 표면을 잡을 수 있는 능력은 해결되지 않은 난제로 여겨져 왔다.
공동연구팀은 이러한 한계를 극복하기 위해 우단벌레의 분비물에서 영감을 얻었다.
자기유변탄성체(MRE)를 활용해 외부 자기장으로 제어되는 빠른 강성 변화를 구현했고, 이를 통해 안정성과 반복성을 가진 정밀한 접착 제어 로봇을 개발했다.
이 기술은 생체 환경에서 △무선 점착 로봇의 물체 운반 △볼트의 너트 제거 △마우스 종양 제거 수술 등의 작업에 적용 가능성을 보이며, 접착 제어 및 넓은 접촉 면적 유지 등 안정적으로 성능을 입증했다.
연구팀은 심도 있는 연구를 통해 산업현장에서 활용할 수 있는 수준으로 기술 완성도를 높일 예정이다.
이번 연구 결과는 지난달 20일 국제 학술지인 사이언스 어드밴시스(Science Advances)에 ‘Stiffness-tunable velvet worm-inspired soft adhesive robot’이라는 제목으로 표지 논문(사진)에 선정됐다.
이번 연구를 주도한 천성우 교수는 “기존 생체 환경에서 섬세한 점착-탈착 제어의 어려움을 복잡한 기계적 구조가 아닌 자연의 생체 모방 로봇으로 해결했다는 점에서 큰 의미가 있다”고 말했다.
세종=임호범 기자
-
1
연구산업 미래발전 모색…국제 연구산업 컨벤션 2024 개최
국내외 연구산업의 역할을 재조명하고, 미래 발전 방향을 모색하는 국제행사가 대전에서 이틀간 펼쳐진다.과학기술정보통신부는 28~29일 이틀간 대전컨벤션센터 제2전시장에서 ‘국제 연구산업 컨벤션 2024&rs...
-
2
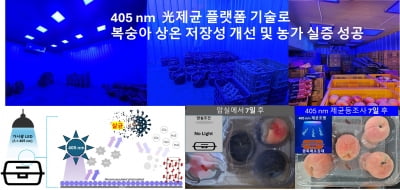
고려대 세종캠퍼스, 가시광 제균기술 활용 친환경 농산물 저장 기술 개발
고려대학교 세종캠퍼스는 손호진·김성관 신소재화학과 교수가 육현균 중앙대학교 식품공학전공 교수와 함께 405nm 파장의 가시광 제균 기술을 활용한 친환경 농산물 저장 기술을 개발했다고 18일 밝혔다.여름철...
-
3
KISTI 최기석 연구원, 2024 대한민국 재난안전 연구개발 대상 행정안전부 장관상 수상
한국과학기술정보연구원(KISTI)의 최기석 도시재난솔루션연구팀 책임연구원이 고성능 컴퓨팅(HPC) 활용 고정밀 침수모델 개발 및 UDS 솔루션 현장 적용 기술로 2024년 대한민국 재난 안전 연구개발 대상에 행정안전...


![K팝 업계에도 '친환경' 바람…폐기물 되는 앨범은 '골칫거리' [연계소문]](https://img.hankyung.com/photo/202206/99.27464274.3.jpg)


