"목수 뺨치네"… 로봇팔로 이케아 의자 조립
입력
수정

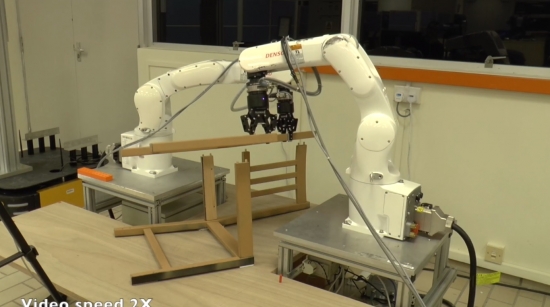
쿠앙쿠옹 팜 싱가포르 난양공대 기계항공우주공학과 교수 연구진은 일본 덴소 로보틱스가 개발한 산업용 로봇팔 2기를 이용해 세계적인 가구회사 이케아가 판매하는 나무의자를 조립하는데 성공했다고 18일(현지시간) 국제학술지 사이언스 로보틱스에 발표했다.자동차 조립부터 선박 건조까지 다방면에서 활용되는 로봇이 의자를 조립한 일은 언뜻 보면 대단해 보이지 않을 수 있다. 하지만 공장에서 로봇팔로 이뤄지는 작업은 주로 정해진 동작을 반복적으로 수행하는 방식이 대부분을 차지한다. 하지만 책상이나 의자 같은 목재 가구는 각 부분마다 조립 방식이 다르고 일부는 민감한 힘을 주는 정교한 작업이 필요하기 때문에 특별하게 제작된 로봇이 아니면 사람 손재주를 따라가기 어려웠다. 사람에겐 눈썰미와 손재주로 힘을 조절하고 물체를 옮기는 능력이 있지만 기계는 아직까지 이를 따라가지 못하기 때문이다.
연구진은 이번에 일반 산업용 로봇팔과 그리퍼(집게), 힘 감지 센서, 입체(3D) 카메라를 이용해 지금까지는 인간의 손재주가 앞선 목재 의자를 조립할 수 있음을 보여줬다. 두 대 로봇팔은 마치 숙련된 목수처럼 한 대는 의자 부품을 잡아주고 다른 한 대는 볼트를 조이는 등 팀워크를 이뤄 의자를 조립했다. 연구진이 사용한 로봇은 자동차 조립과 항공기 제작 등에 사용되는 산업용 로봇팔이다. 목수의 눈 역할을 하는 입체 카메라가 무작위로 흩어져 있는 부품을 인식하면 로봇팔에 설치된 힘 감지 센서가 재질에 맞게 힘을 가해 부품을 집어 올린다. 로봇팔은 또 핀이 알맞은 구멍으로 들어갔는지 확인하기 위해 의자를 잡고 확인하는 작업도 수행했다.
연구진은 이런 방식으로 20분 19초 만에 의자 하나를 성공적으로 조립했다. 11분 21초는 조립에, 8분 55초는 부품을 찾아 집는데 소요됐다. 숙련되지 않은 사람보다 조립시간이 훨씬 빠른 편이다.사이언스 로보틱스는 이번 연구를 통해 로봇이 무작위로 흩어진 부품에서 정확한 부품을 식별하고 여러 대 로봇팔이 협력하는 과정에서 서로 충돌하지 않고 조화롭게 협동하는 기술이 검증됐다고 설명했다. 연구팀 관계자는 “이번 실험에서는 직접 짠 소프트웨어로 로봇팔을 작동시켰지만 향후 인공지능(AI)과 결합하면 완전히 자율적으로 동작하는 목공 로봇을 개발할 수 있을 것”이라고 전망했다.
박근태 기자 kunta@hankyung.com